
Réglage du moteur
Dans cette boîte de dialogue, vous pouvez optimiser les paramètres du contrôle du moteur d’un module de locomotives CTC en utilisant des données en temps réel. Pour cela, la locomotive transmet constamment la valeur du capteur du moteur, la valeur cible et la valeur de commande calculée par le régulateur PID. Tant que les trois valeurs sont à 0, le diagramme est “gelé”.
Les paramètres affichés correspondent chacun au mode de fonctionnement actuellement sélectionné (Mode moteur) de la locomotive. Les paramètres kP, kI et kD sont importants uniquement dans le mode moteur “PID” et sont ignorés dans le mode moteur “Direct”.
En cliquant sur le bouton Set correspondant, la valeur à gauche est directement transmise à la locomotive et reste ainsi jusqu’à la réinitialisation de la locomotive. Ce n’est que lorsque vous cliquez sur “Télécharger la config du moteur” que vos paramètres sont enregistrés en permanence.
Paramètres du contrôle de charge (régulateur PID) :
- kP détermine comment le moteur réagit directement aux changements du capteur. Une valeur trop élevée donne un comportement de conduite cahoteux, une trop faible signifie que le moteur prend beaucoup de temps à réagir à une valeur cible ou de capteur modifiée.
- kI détermine à quel point le moteur réagit à la somme de toutes les divergences de la valeur cible.
- kD détermine à quel point le moteur réagit à la différence entre la valeur actuelle du capteur et la précédente.
- le taux d’échantillonnage peut seulement être réglé directement dans le cfg.xml et devrait rester à la valeur par défaut de 20 ms.
Plage de réglage de la sortie du moteur :
- Min et Max définissent la plage de contrôle du moteur (0..1023). Cela permet d’exclure la plage inférieure où le moteur ne tourne pas et de limiter la vitesse maximale.
- Avec Crawler, vous déterminez la vitesse de grimpeur, qui est la vitesse lors du déclenchement (“valse d’embrayage”) ainsi que la vitesse cible pour le freinage à vitesse minimale.
Paramètres pour le freinage et l’accélération :
- Freins est la constante d’accélération pour les processus de freinage (en mm/s²). La valeur indiquée est positive et est multipliée par -1 dans la locomotive. Si la valeur est 0, la valeur par défaut 250 est utilisée.
- Accélérer est la constante pour les processus d’accélération (en mm/s²). Si la valeur est 0, la valeur par défaut 250 est utilisée.
- Facteur de Freinage est divisé par 1000 et augmenté de 1 pour être utilisé comme facteur d’amplification lors du freinage cible. Dans l’exemple (800), il est donc multiplié par 1,8. En augmentant le facteur de freinage, le décrochage à la fin du freinage peut être réduit. Un facteur de freinage trop élevé provoque une courbe de freinage inversée.
- Réaction donne le temps en millisecondes lors du freinage avant que le moteur ne commence à ralentir. Ce paramètre fonctionne à partir de la Firmware 20230609 (CTC-App 4.17).
Note : Tant que la boîte de dialogue Régler le moteur est ouverte, la locomotive envoie de nombreux paquets de données non synchronisés pour le diagramme. Ce trafic de données accru peut entraîner des pertes de paquets de données plus fréquentes (#Msg.Miss dans l’Affichage des statistiques).
Optimisation des paramètres de freinage
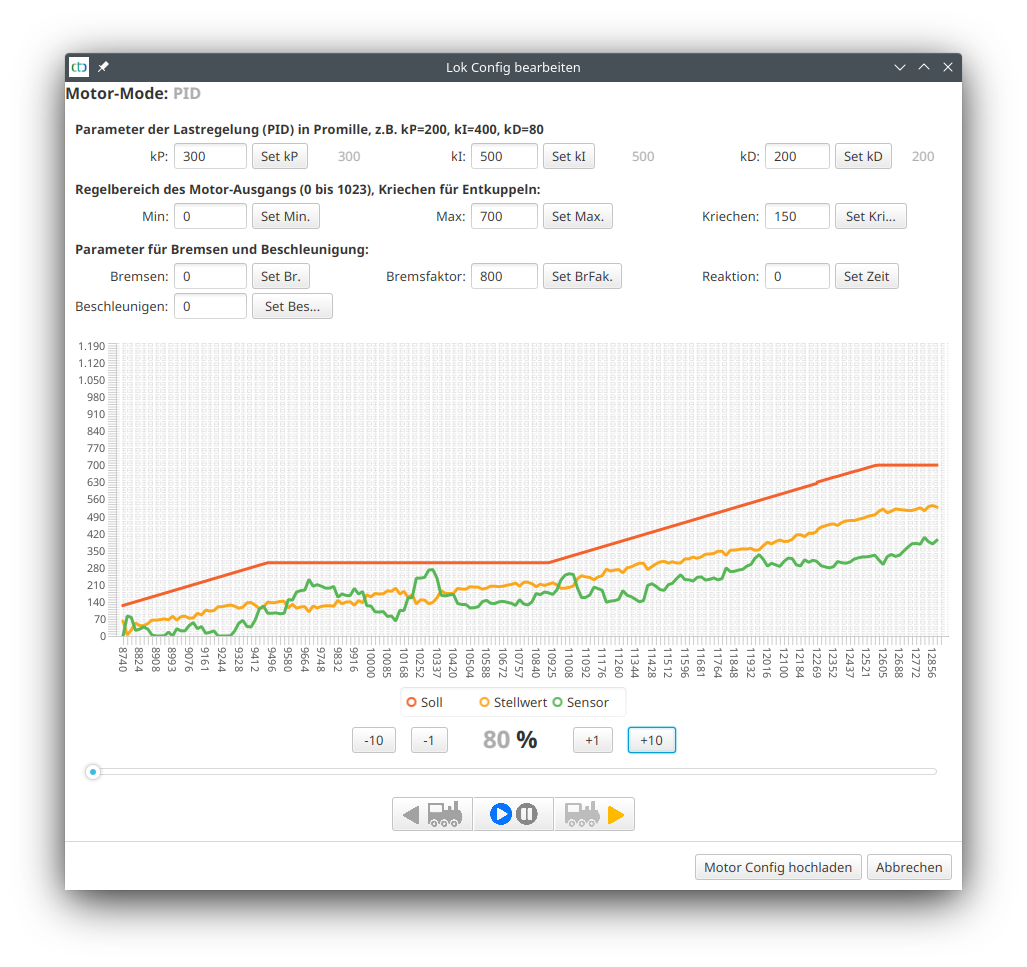
Pour optimiser le freinage cible, j’utilise un parcours circulaire avec un signal devant lequel la locomotive est arrêtée à l’aide de 2 balises. La locomotive est devant le signal rouge et a une vitesse de 70% dans l’exemple. Ensuite, le signal est ouvert et dès que la locomotive a démarré, il est de nouveau fermé.
Dans l’exemple suivant, vous pouvez voir la locomotive arrivant à 70% (700) (Piko BR 147), puis le processus de freinage jusqu’à la vitesse minimale (paramètre “vermine” 150), une courte période de vitesse minimale et tout à droite l’arrêt. Dans la première tentative, le facteur de freinage et le retard sont réglés sur 0 :
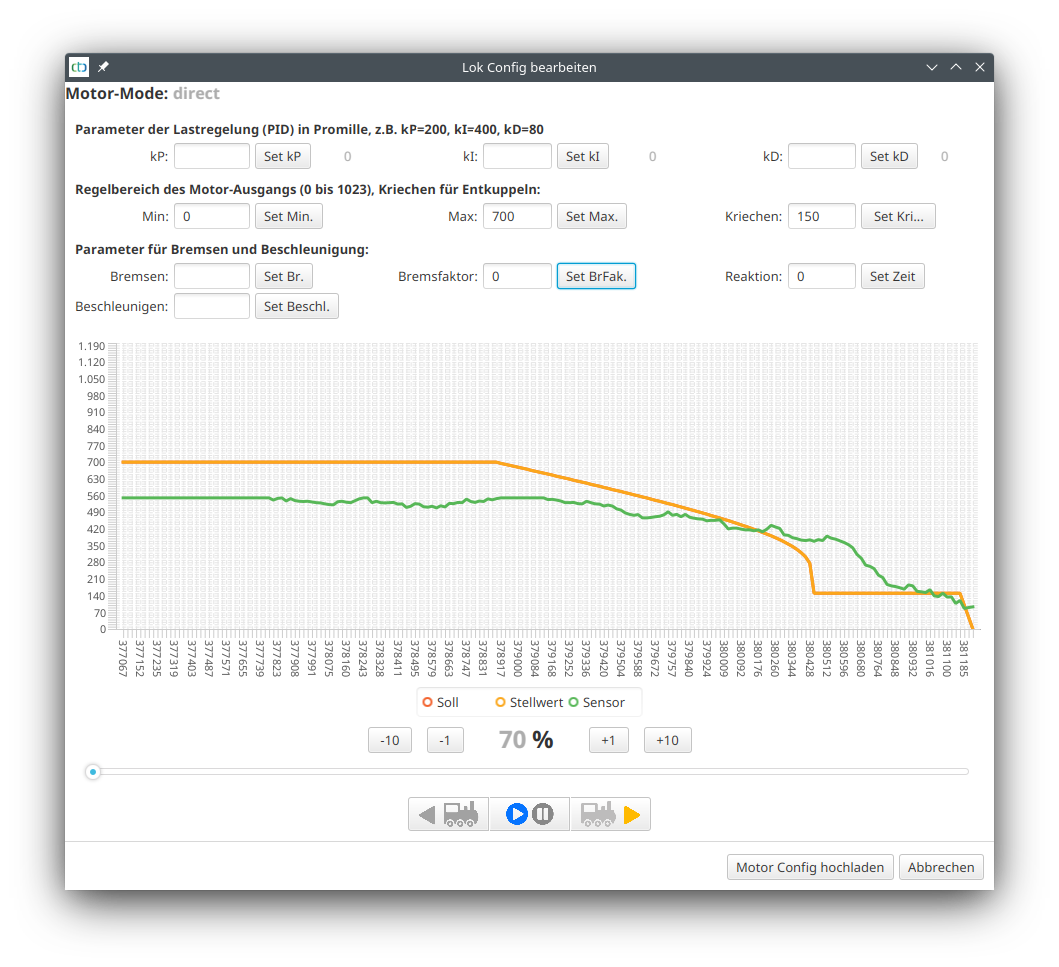
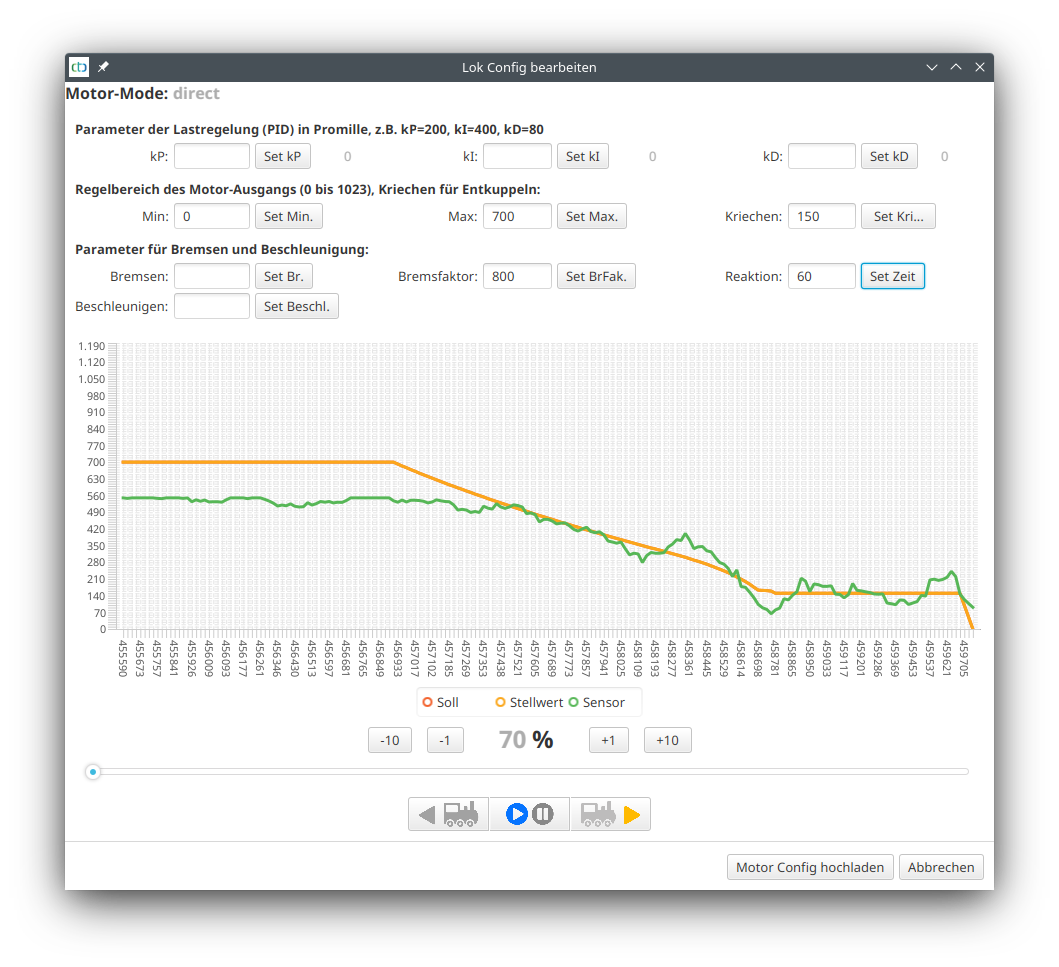
Maintenant, la courbe de freinage a été optimisée et les valeurs optimales ont été déterminées expérimentalement pour le facteur de freinage 800 et la réaction 60 :
Remarque : Ceux qui veulent vraiment tout savoir peuvent trouver les données transférées pendant la mesure sous le nom de “Motor-Setup.csv” dans leur répertoire d’utilisateurs. Ce fichier peut être ouvert par exemple avec Excel ou LibreOffice et peut être analysé en détail.